
概要:
コンピューティングとロボット技術の著しい進歩にもかかわらず,障害者の日常生活に純粋に影響を与えるために,これらの開発を利用する支援機器は,依然として利用されていない.これらの技術を効果的に活用するための主な障壁の1つは,リアルタイムの協調やコラボレーションを阻害する,人間と機械の間の「低帯域幅」インターフェースにある.我々は,(1)人間の運動適応のより良い理解,(2)人間の共同行動における社会的メカニズムのシミュレーション,(3)高次元空間から低次元空間への情報マッピングのための運動制御/学習原理と機械学習の活用を通じて,この障壁を回避し,コラボレーションを改善することを目指している.
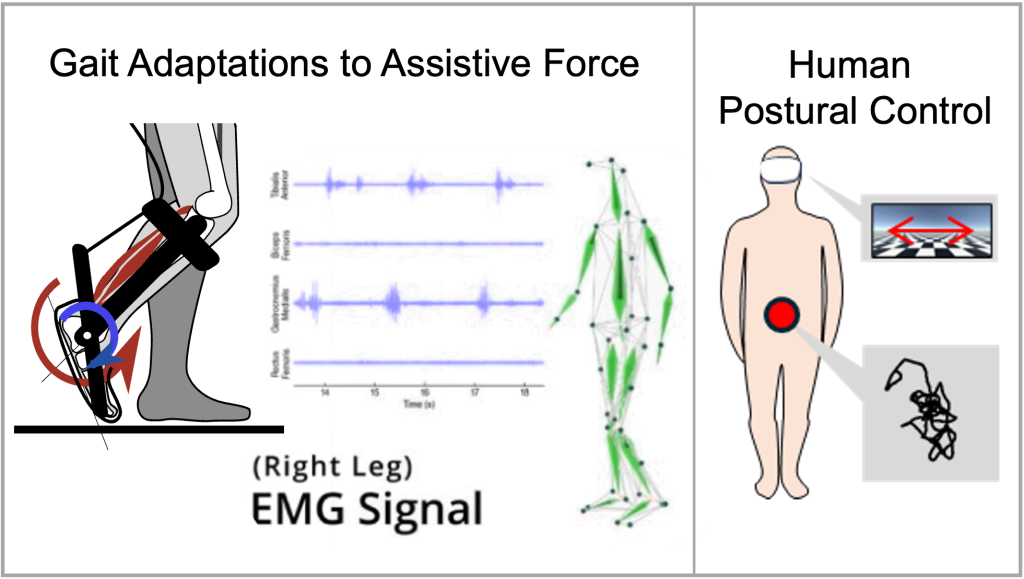
人間の運動適応の理解:
歩行などの日常生活における基本的な動作の多くは,ほとんど無意識のうちに自動化されている.これには,動作や補助装置からの力に対するユーザーの反応も含まれます.身体補助装置を設計する際にユーザーの適応を考慮することで,装置に対する反応の遅さを軽減し,ユーザーの予測制御を最大化することができます.
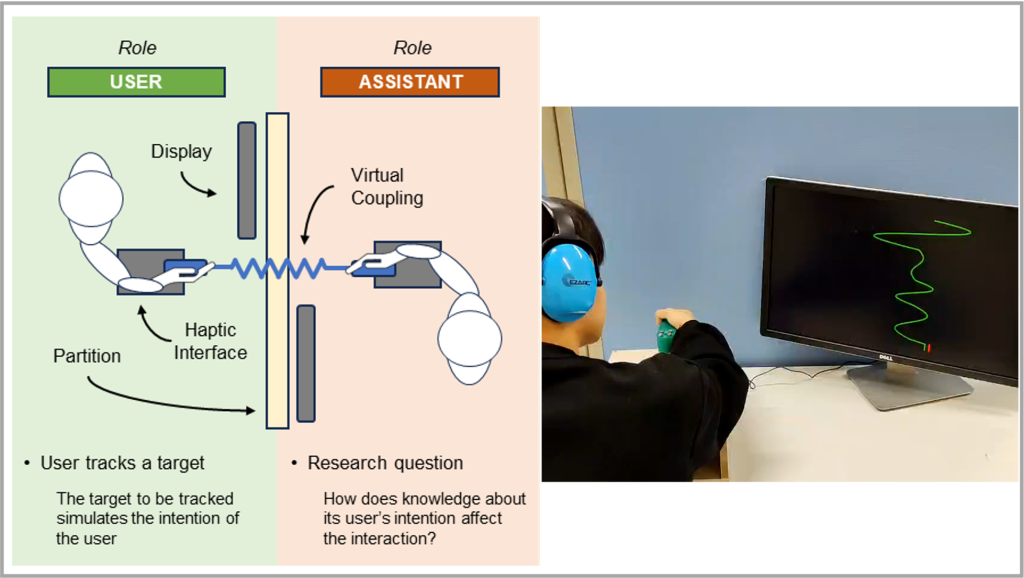
共同行動原則の策定と適用:
人間は,自分の行動を他人と協調させることに非常に長けている.人間がどのように非言語的なコミュニケーションを行い,協調しているのかを理解し,ロボットとのそのような相互作用をシミュレートすることで,人間と機械の間でより良い意図を共有することができる.私たちは特に,一方が他方の負担を最小限にすることだけを考えているような非対称的な関係の場合に興味を持っています.
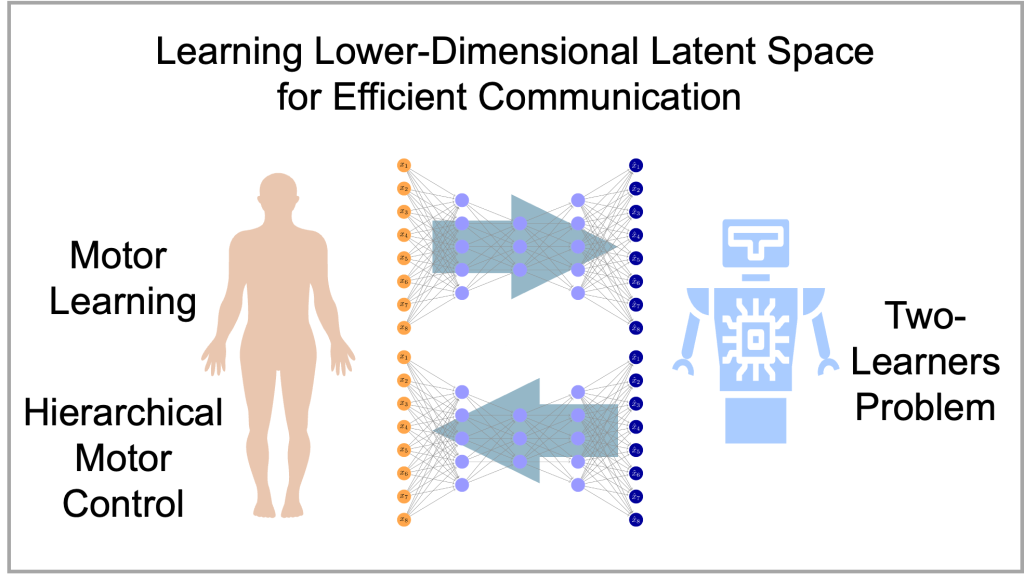
高次元空間から低次元空間への情報マッピングによるコミュニケーション:
人間と機械の間の帯域幅を最大限に利用する一つの方法は,人間のユーザーが機械に明示的なコマンドを与えるように訓練することである.我々は,階層制御と筋シナジーからヒントを得て,複雑なユーザーコマンドをロボットの動作にマッピングすることを目指している.同様に,ロボットの複雑な観察と意図を,人間が理解できる単純な信号にマッピングすることを目指している.
関連する業績:


関連する外部予算プロジェクト:
研究予算:
独立行政法人日本学術振興会 科学研究費助成事業(科研費)
研究種目:若手研究 21K17791
研究期間:2021〜2024
研究課題名:足関節底屈アシスト時の歩行と筋活動パターンについて
研究代表者:YEOH Wen Liang