
概要:
ロボットやAIの進化にともなって,人間よりも正確,高精細に動作できるロボットや,人間よりも高速に判断をできるAIが誕生しており,一部では人間の能力をはるかに超えるようなテクノロジーが誕生しています.我々人類は,このようなテクノロジーとどのように共生したら良いのでしょうか?
ダブルブレイン(ヒト脳+人間脳)協調型の人間支援システム
AIやロボットは,作業の精度・効率の向上および省力化に必要不可欠な要素であり,両者が同じ環境で協働するロボットやパワーアシスト,AIシステム等の研究が,これまでに積極的かつ精力的に行われてきました.しかしながら,これらのシステムを注意深く観察すると,多くの局面で作業の主導権を握っているのは「人間」か「システム」か,いずれか片方である場合が多いようです.本研究室では,このような問題に対して,人間とAIロボットとが,一緒に見て,考えて,動作する技術について研究開発しています.人間とAI・ロボットに対し,同時に1つの目標が与えられた際に,両者が各々の強みを融合させ,パフォーマンスを最大化するような技術の創成を目指しています.


研究紹介:
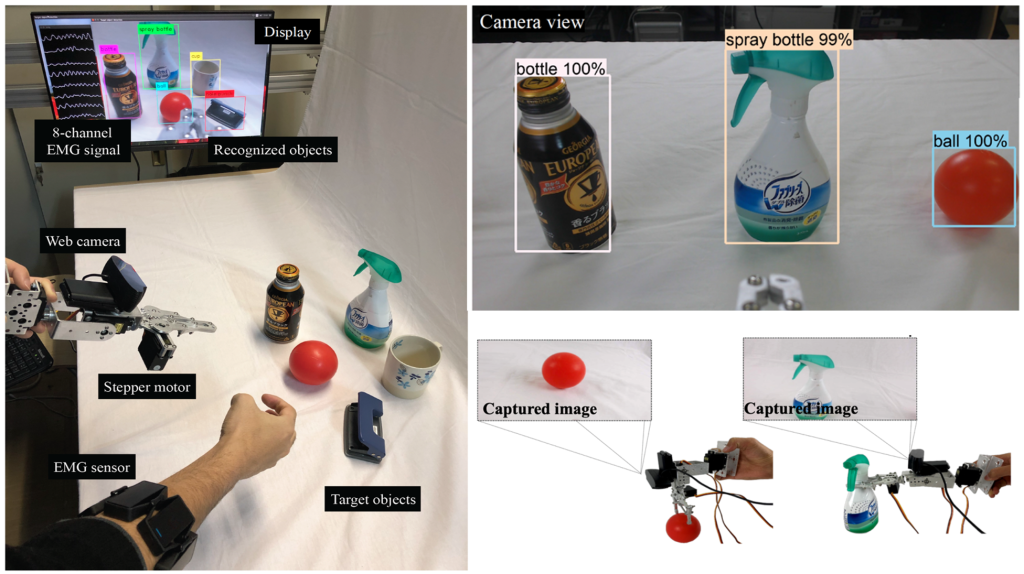
筋電位信号を利用した電動義手は,自然で直感的な制御が可能になると期待されてきましたが,実際には,10動作程度がその限界でした.本研究では,この写真に示すように,この筋電義手に画像認識AIを導入して,物体認識と筋電制御を組み合わせた全く新しい筋電位義手を開発しました.

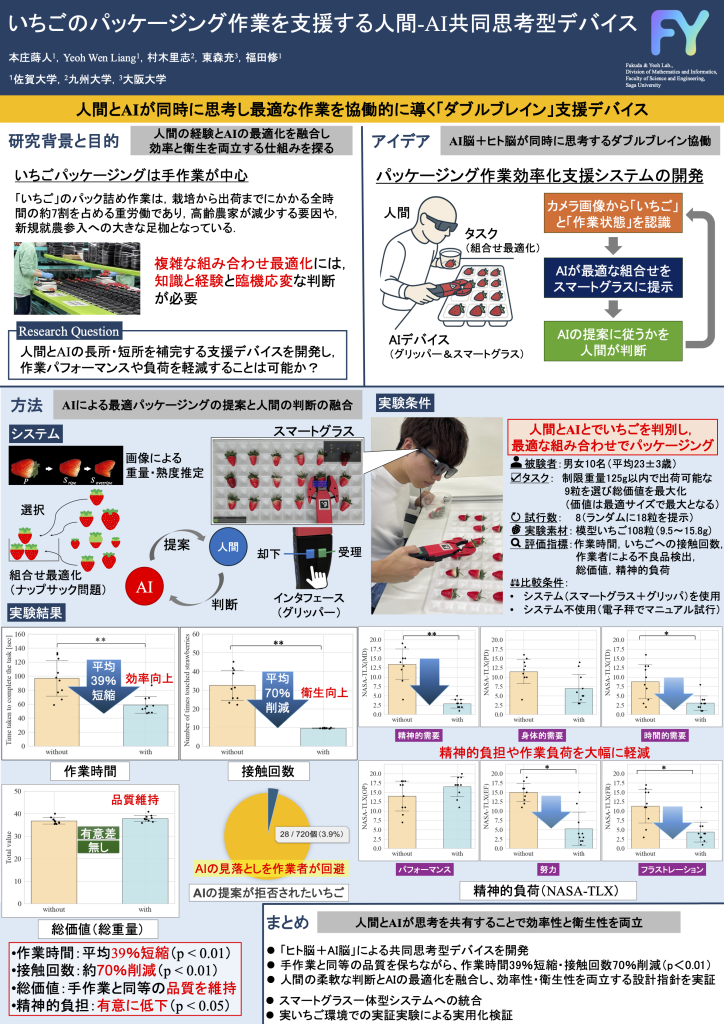
製造・農業・流通などの現場では,取り扱うアイテムを正確かつ効率的にハンドリングする必要があります.本研究では,アイテムをハンドリングするツールに,AI画像認識を組み合わせることで,正確で誤りがなく,効率的に作業を実行できるウェアラブル型のロボットハンドを開発しました.写真のロボットハンドでは,4つ葉のクローバーだけを正確に検出し,掴むことができます.

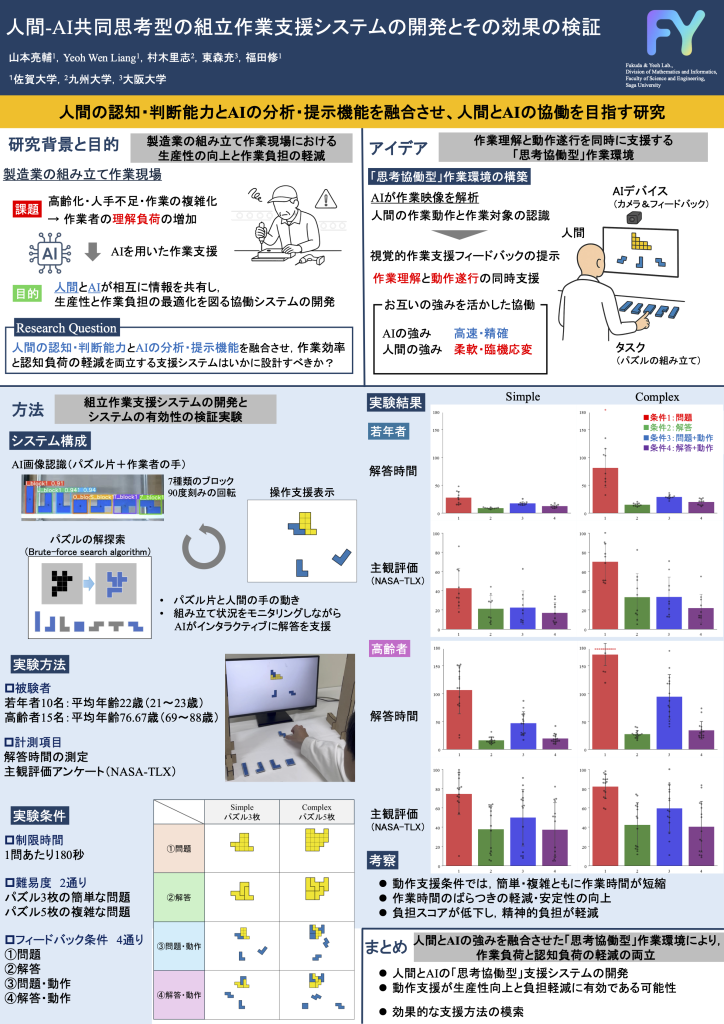
人間の衰えた機能を補ったり,本来の能力よりも高めたりすることを目的として,パワーアシストデバイスや,拡張現実の提示などの技術が研究されていますが,人間の身体能力と知覚能力を同時に支援することができるシステムはこれまでに存在しませんでした.本研究では,写真で示すように,シルエットパズルの解答を身体能力と知覚能力の両面で支援するデバイスを開発しました.
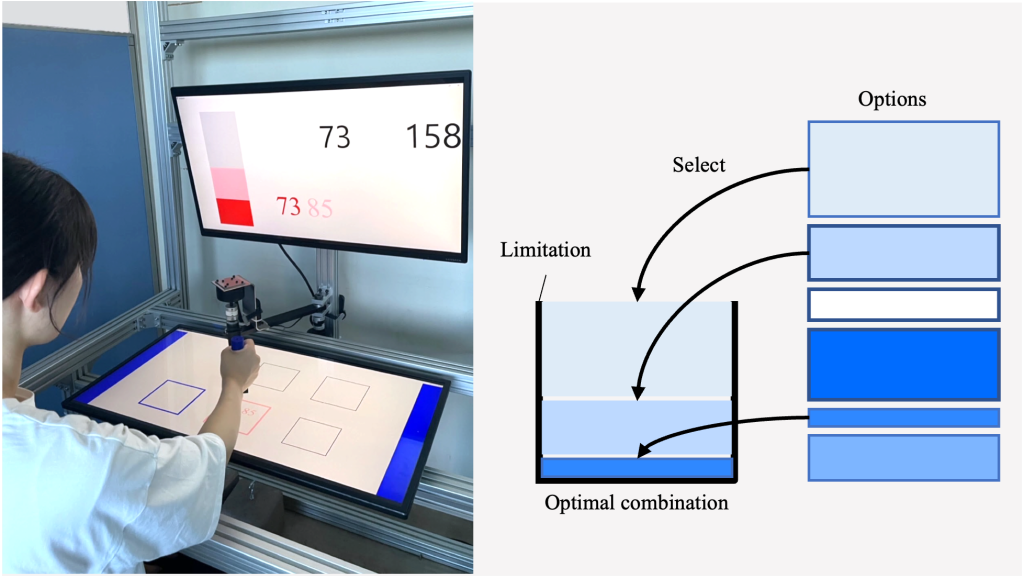
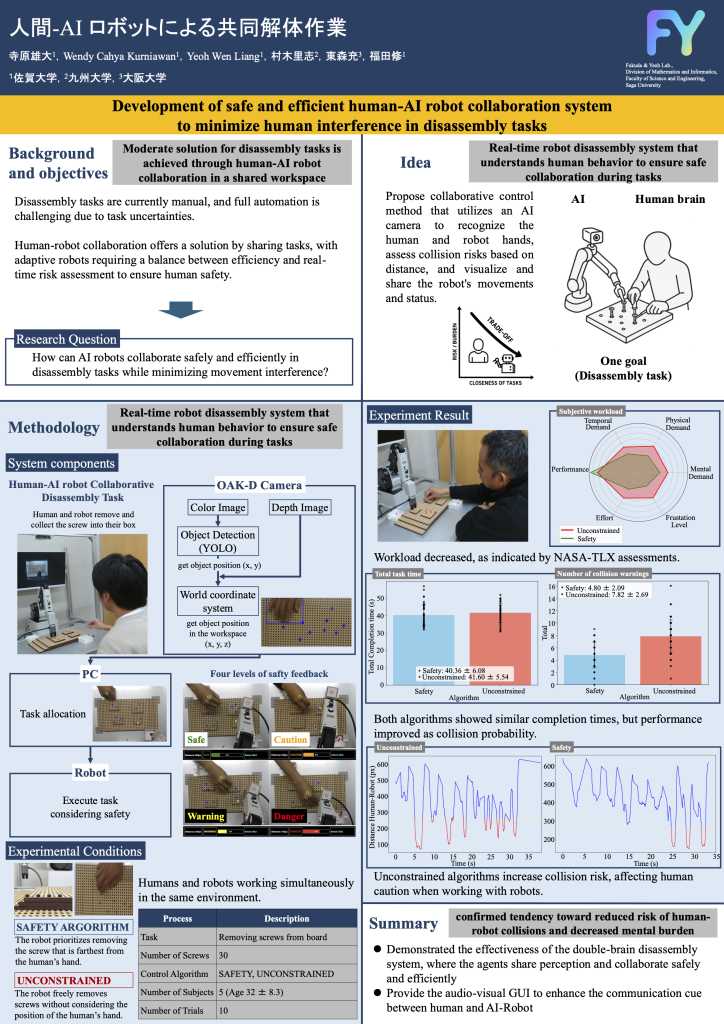
人間と協働するロボットが普及されつつありますが,稼働状況を注意深く観察すると,ロボットと人間とは,分割された別々のタスクを実施しています.本研究では,1つの目標に向かって「AI脳」と「人間脳」を組み合わせるダブルブレイン型の協働ロボットシステムを開発しました.写真では,正確で高速なAI脳と,柔軟で臨機応変な人間脳が協働し,組み合わせ最適化問題に取り組んでいます.
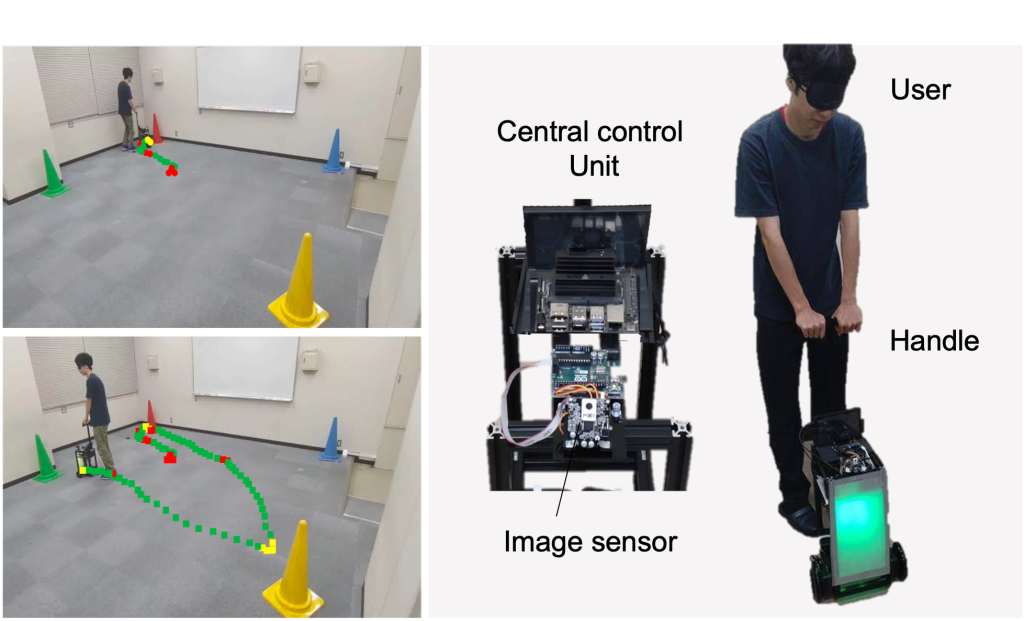
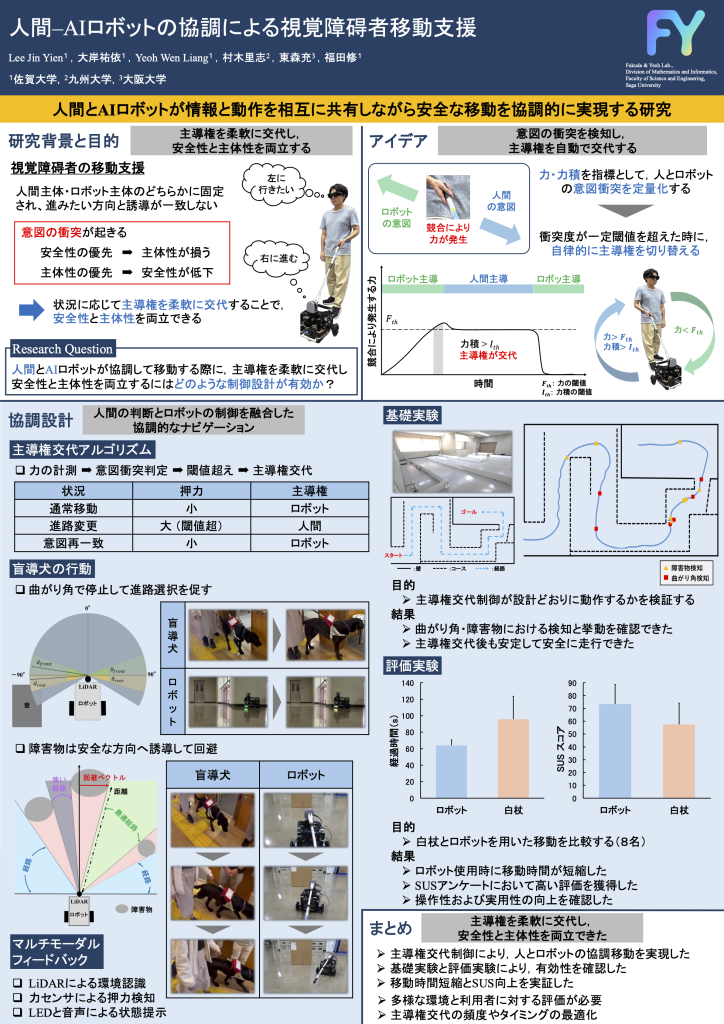
盲導犬は,視覚障碍者の目の代わりの役割をし,彼らの移動を支援しています.この際,視覚障碍者と人間とは,目標地点へ到達するというタスクを協働して実施していると考えることができます.本研究では,人間とハンドルで繋がれた移動ロボットに画像認識機能を搭載し,人間と協力し合いながら目標地点へとナビゲートする盲導犬型のロボットを開発しています.
- Yumenavi TALK,FROMPAGE.Co.,Ltd.
- ICEEIE, Keynote
- 大学見本市2019 イノベーション・ジャパン,紹介動画
- IEEE ACCESS, Video abstract
- 新技術説明会,紹介プレゼン
- 学生が作成したDEMO動画(1, 2, 3, 4)
関連する業績:


関連する外部予算プロジェクト:
独立行政法人日本学術振興会 科学研究費助成事業(科研費)
研究種目:基盤研究(C) 19K04296
研究期間:2019〜2021
研究課題名:深層学習に基づく空間認識能力の実現と感覚統合型筋電義手制御への応用
研究代表者:福田 修
独立行政法人日本学術振興会 科学研究費助成事業(科研費) 研究種目:基盤研究(B) 23H03440 研究期間:2023〜2026 研究課題名:ダブルBrain(ヒト脳+AI脳)協調型人間拡張ロボットの創成と実証 研究代表者:福田 修